Roboter-assistierte Wirbelsäulenchirurgie:
Bei der transpedikulären Verschraubung stößt der Operateur an seine motorischen Grenzen
Stuttgart (rds). Wissenschaftler der Fraunhofer-Gesellschaft stellten den Prototypen eines Hexapod-Robotersystems für den Einsatz in der Wirbelsäulenchirurgie vor. Die dafür in enger Zusammenarbeit mit Medizinern entwickelte robotergestützte Operationstechnik senkt das Risiko einer Nervenschädigung erheblich.
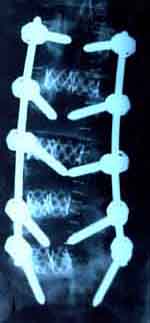
Die manuelle transpedikuläre Knochenverschraubung gilt in Europa als Standardverfahren zur Versteifung geschädigter Wirbelkörper. Die Schrauben müssen dabei sehr präzise gesetzt werden, um die Nerven im Spinalkanal nicht zu verletzen. Bei Hals- und Brustwirbeln ist der Operationsbereich für die Hand des Chirurgen schlecht zugänglich, und die extrem feinen Strukturen erfordern eine manuell kaum erzielbare Genauigkeit. Hier stößt die Motorik des Operateurs schnell an ihre Grenzen.
Mehrere Fraunhofer-Institute entwickelten im Rahmen des Forschungsprojekts RoMed (Roboter und Manipulatoren für Medizinische Einsatzfelder) ein modulares Chirurgiesystem für die transpedikuläre Verschraubung, das künftig den Chirurgen durch hohe Präzision und Reproduzierbarkeit beim Bohren und Schrauben in der Wirbelsäule unterstützen soll. Das StuttgarterFraunhofer-Institut für Produktionsautomatisierung präsentierte das Funktionsmuster am 8. März 2001 im Rahmen eines Symposiums „Präzisionsrobotik in der Wirbelsäulenchirurgie“ an Ihrem Institut.
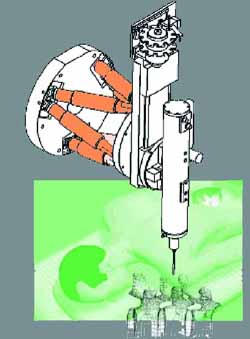
Ein Hexapod positioniert den Bohrer mikrometergenau
Als Präzisionskinematik dient dabei ein Hexapod, das dank seiner extremen Steifigkeit auch bei großen Kräften und ungünstigen Arbeitswinkeln eine Positioniergenauigkeit im Submillimeterbereich bietet. Da der Arbeitsbereich eines Hexapods aber nur wenige Zentimeter beträgt, wird der Hexapod mit einer weiteren Kinematik grob auf die Hauptzugangsrichtung des chirurgischen Eingriffs eingestellt und fixiert.
Ein eigens entwickelter sterilisierbarer Bohr-Schrauber sitzt zusammen mit einem automatischen Wechselmagazin für Bohrer und Schrauben auf einer Instrumentenplattform am Hexapod. Sensoren für Kraft und Drehmoment überwachen den Bohr- und Schraubprozess und reagieren unmittelbar auf patientenspezifische Knochenveränderungen, die beim manuellen Bohren zu abrupten „Durchbruchsbewegungen“ führen können.
Präoperative Planung wird präziser umgesetzt
Mit den vorab erstellten Computertomographiedaten errechnet ein am Fraunhofer IGD entwickelte Navigations- und Planungssystem ein 3-D-Modell der Wirbelsäule. Anschließend bestimmt der Operateur die relative Lage der Zugangsrichtungen für den Eingriff sowie die Position der Instrumente und Schrauben. Die Planungsdaten sind die Basis für die Steuerung des Robotersystems. Während der Operation überwacht ein am Fraunhofer IBMT entwickeltes Ultraschallpositioniersystem alle Bewegungen der Wirbelsäule des Patienten und korrigiert in Echtzeit die Position des Bohrkopfs.
„Die Robotik setzt die Genauigkeit der präoperativen Planung präziser intraoperativ um, als es bei konventionellen Operationsmethoden der Fall ist.“ konstatierte Prof. Martin Börner von der BG-Unfallklinik Frankfurt auf dem Stuttgarter Symposium.
Sterilisierbare Mensch-Computer-Schnittstelle
Komplexe Aufgaben wie die intraoperative Planung neuer Trajektionslinien für die Bohr-Schraubrichtung, die nur der verantwortliche Chirurg am Bildschirm durchführen kann, sind unter Aspekten der Sterilität problematisch. Bisher existieren jedoch noch keine Ein- und Ausgabegeräte für Computer, die der herkömmlichen thermischen Sterilisationsprozedur standhalten können.
Die Ingenieure des Fraunhofer IPA entwickelten deshalb eine neue Mensch-Maschine-Schnittstelle, bei der sich die elektronischen Komponenten außerhalb des sterilen Bereichs befinden. Ein Beamer projiziert das Computerbild über beliebige Entfernungen blendfrei auf eine matte Glasscheibe im sterilen Bereich. Eingaben erfolgen durch Anklicken des Bildschirms mit einem optischen Eingabepointer, der wie die Projektionsscheibe sterilisierbar ist.
Das Robotersystem ist über ein fehlersicheres Funknetzwerk drahtlos mit dem Rechner verbunden. Alle Prozesse und Vorgänge können auf diese Weise von der Konsole aus zentral ausgelöst und überwacht werden. Der Chirurg hat somit während der gesamten Operation die Möglichkeit, den Prozess zu verfolgen und aktiv auf ihn einzuwirken.
Roboter gehören heute zum klinischen Alltag
An der Berufsgenossenschaftlichen Unfallklinik Frankfurt, einem Zentrum des rechnerunterstützten Operierens, sind mehrere Robotersysteme im Einsatz. Hier wurden bislang rund 4.000 Totalendoprothesen des Hüftgelenks mit Hilfe des Operationsroboters »Robodoc« erfolgreich eingesetzt. »Die optimale präoperative Planung und die Umsetzung durch den Roboter haben eine Reduzierung der Komplikationsrate im Vergleich zu den von Hand implantierten erbracht«, zog Chirurg Börner in Stuttgart Bilanz. Im März 2000 nutzten Prof. Börner und sein Ärzteteam erstmals die Weiterentwicklung von Robodoc zum roboterassistierten Einsetzen eines künstlichen Kniegelenks (KTEP). Neben drei »Robodoc« werden in Frankfurt auch Navigationssysteme und ein neurochirurgischer Roboter eingesetzt.
Das Fraunhofer IPA stellte vor drei Jahren den ersten Prototyp eines neuartigen Robotersystems für neurochirurgische Eingriffe vor. Weiterentwickelt in Zusammenarbeit mit einem Hersteller (URS) in Parchim, hat es unter dem Namen »Evolution 1« inzwischen Produktreife erreicht. Für die Entwicklung des modularen Wirbelsäulen-Chirurgiesystems zur Serienreife wird noch ein Partner gesucht.
Copyright: Roland Dreyer 2001
|